Shortest Distance Path
In this case, we want to determine if one vertex is reachable from another. Recall that a vertex u is reachable from v if there is a (directed) path from v to u.1
Search Strategy: Breadth First Search (BFS) Algorithm
The breadth-first algorithm is a particular graph-search algorithm that can be applied to solve a variety of problems such as
- finding all the vertices reachable from a given vertex,
- finding if an undirected graph is connected,
- finding (in an unweighted graph) the shortest path from a given vertex to all other vertices,
- determining if a graph is bipartite,
- bounding the diameter of an undirected graph,
- partitioning graphs,
- and as a subroutine for finding the maximum flow in a flow network (using Ford-Fulkerson’s algorithm).
As with the other graph searches, BFS can be applied to both directed and undirected graphs.
BFS Approach
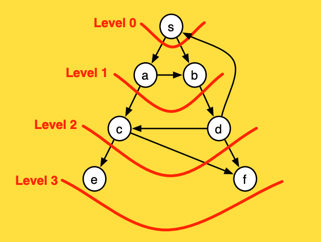
The idea of breadth first search is to start at a source vertex s and explore the graph outward
in all directions level by level, first visiting all vertices that are the (out-)neighbors of s (i.e. have
distance 1 from s), then vertices that have distance two from s, then distance three, etc. More
precisely, suppose that we are given a graph G and a source s. We define the level of a vertex v
as the shortest distance from s to v, that is the number of edges on the shortest path connecting s
to v.
The above animated image provides an insight into the processing steps
- Starting node
ais pushed to the queue withlevelset to0 - Pop the
(node,level)from the queue; at first this is(a,0)- Mark node as
visited(black) - For each edge coming off the node
- If edge is not visited
- calculate
edge-levelas one edge away fromnode, that is,level + 1 - push
(edge, edge-level)at the end of the queue forprocessing(gray)
- calculate
- If edge is not visited
- Mark node as
As a result and as depicted below, at the end of the graph processing, all nodes have been allocated into depth levels
Implementation
We still need to have the means to maintain the following information while we are searching the graph
nodestate, in terms of processed / not processedparentnode, that is, the node we visited fromunitin terms of distance / level
The Tracker structure simplifies managing the node processing state of the graph, and we will use as part of our implementation.
Both Tracker and VecDeque structures are part the Graph processing State structure PDState which in turn, implements the BFSearch abstraction
As a result, the following implementation realises the BFS algorithm
fn path_distance(&self, start:Node, goal:Node) -> Option<(Vec<Node>, Cost)> {
/// Structure for maintaining processing state while processing the graph
struct PDState {
tracker: Tracker,
queue: VecDeque<Node>
}
/// State Constructor from a given Graph and related the initiation requirements for the algo
impl PDState {
fn new(g: &Graph) -> PDState {
PDState {
tracker: g.get_tracker(Undiscovered, 0, None),
queue: VecDeque::<Node>::new()
}
}
}
/// Implementation of Path Search abstraction
impl BFSearch for PDState {
type Output = (Vec<Node>, Cost);
type QueueItem = Node;
/// Initiate search by pushing starting node and mark it as Discovered
fn initiate(&mut self, node:Node) -> &mut Self {
self.queue.push_back(node);
self.tracker[node].visited(Discovered);
self
}
/// Get the first item from the start of the queue
fn pop(&mut self) -> Option<Self::QueueItem> { self.queue.pop_front() }
/// extract Node from the queued Item
fn node_from_queued(&self, node: &Self::QueueItem) -> Node { *node }
/// Has it seen before ?
fn is_discovered(&self, node: NodeType) -> bool { self.tracker[node.into()].is_discovered() }
/// Process Edge before pushing it at the end of the queue
fn pre_process_edge(&mut self, src: Node, dst: NodeType) -> bool {
let level = self.tracker[src].dist + 1;
// mark visited, calculate distance & store parent for distance
self.tracker[dst.into()].visited(Discovered)
.distance(level)
.parent(src);
true
}
/// Construct queued item from Node
fn node_to_queued(&self, node: Node) -> Self::QueueItem { node }
/// Push item at the end of the queue
fn push(&mut self, item: Self::QueueItem) { self.queue.push_back(item) }
/// Extract path discovered so far
fn extract_path(&self, start: Node) -> Self::Output { self.tracker.extract(start) }
}
// Construct the state structure and search for a path that exists between start -> goal
PDState::new(self).path_search(self, start, goal )
}